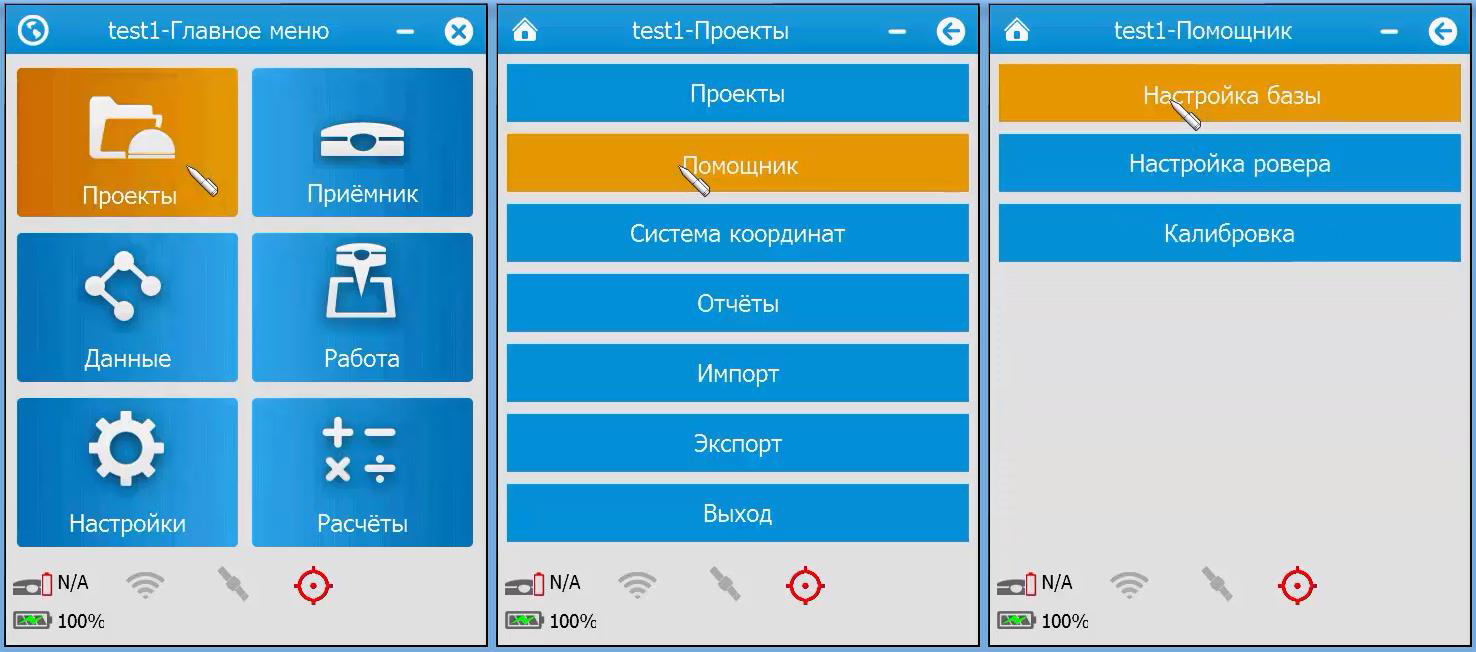
1. Для начала мы настраиваем базовую станцию.
Для этого заходим в Проекты – Помощник – Настройка базы.
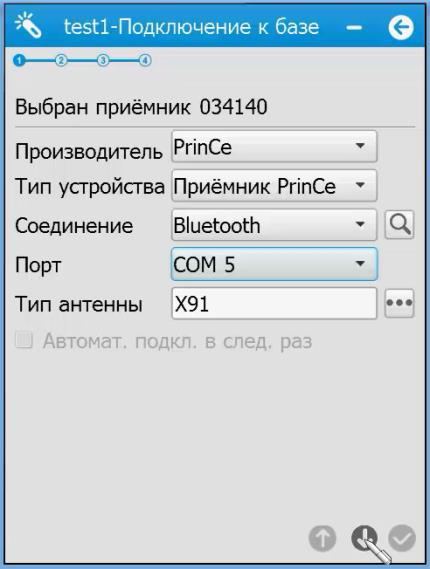
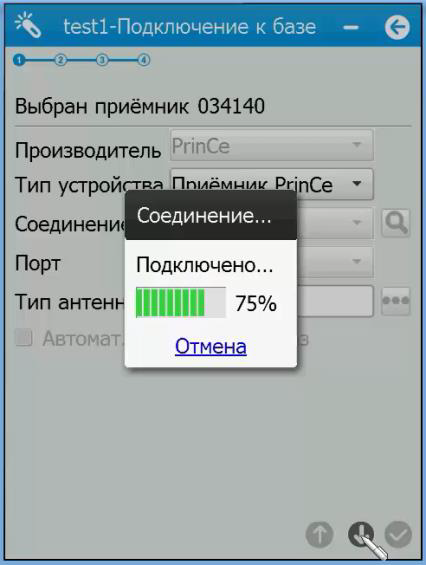
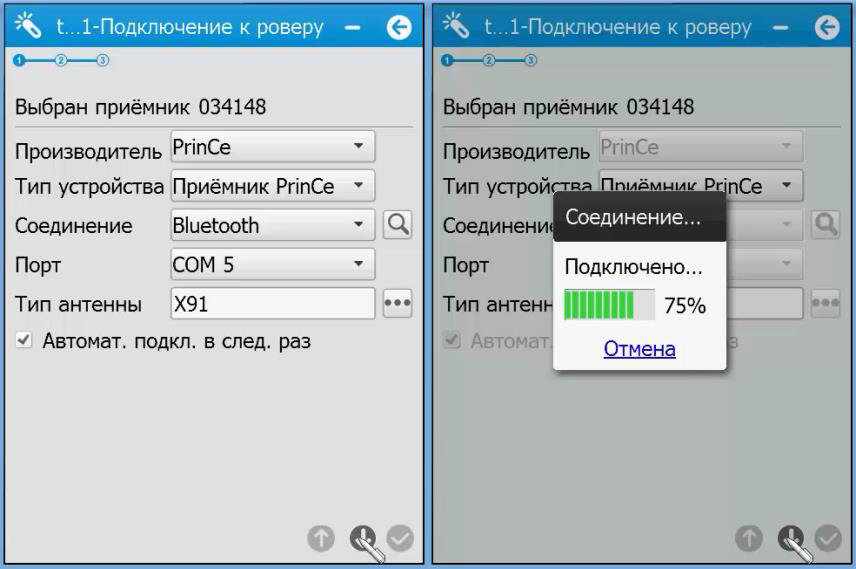
2. Подключаем контроллер к приемнику.
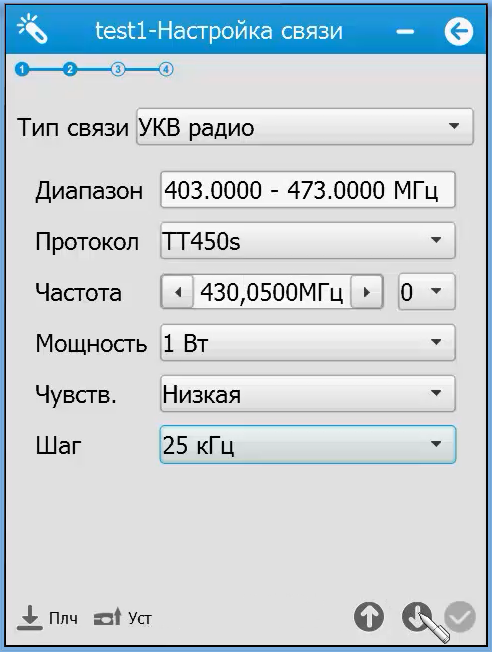
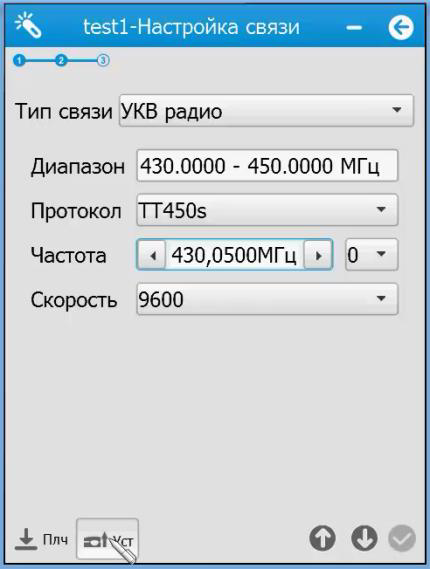
3. Указываем тип связи «УКВ радио», протокол, частоту (можно выбрать предустановленные или задать самому), указываем мощность, чувствительность, шаг частоты, нажимаем кнопку «Установить» и стрелочку вниз.
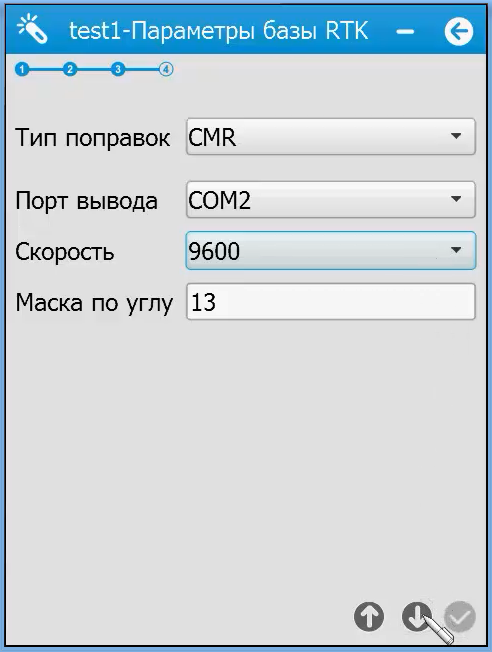
4. Указываем тип поправок, порт вывода COM2, скорость по порту, маску и нажимаем стрелочку вниз.
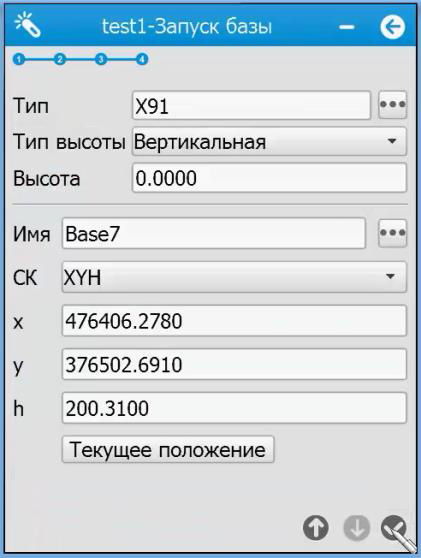
5. Далее выбираем тип приемника, метод измерения высоты, вводим высоту приемника и задаем координаты базовой станции. Можно выбрать текущее положение, ввести координаты вручную или выбрать из списка координаты базовой станции. Для завершения установка нажимаем галочку в нижней части экрана.
После этого начнет мигать зеленый светодиод.
Далее необходимо подождать пока контроллер автоматически отключится от приемника (примерно 10 секунд).
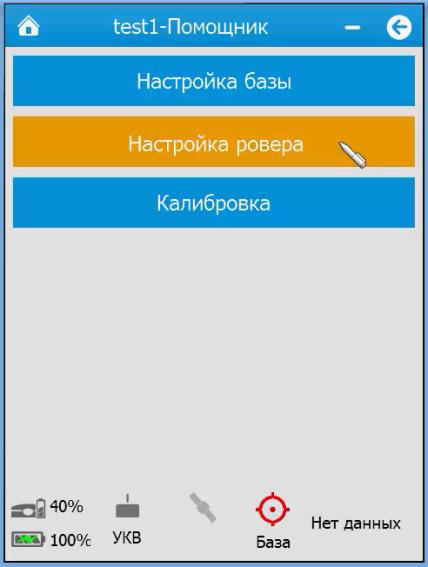
6. Далее мы производим настройку ровера.
7. Подключаемся к приемнику.
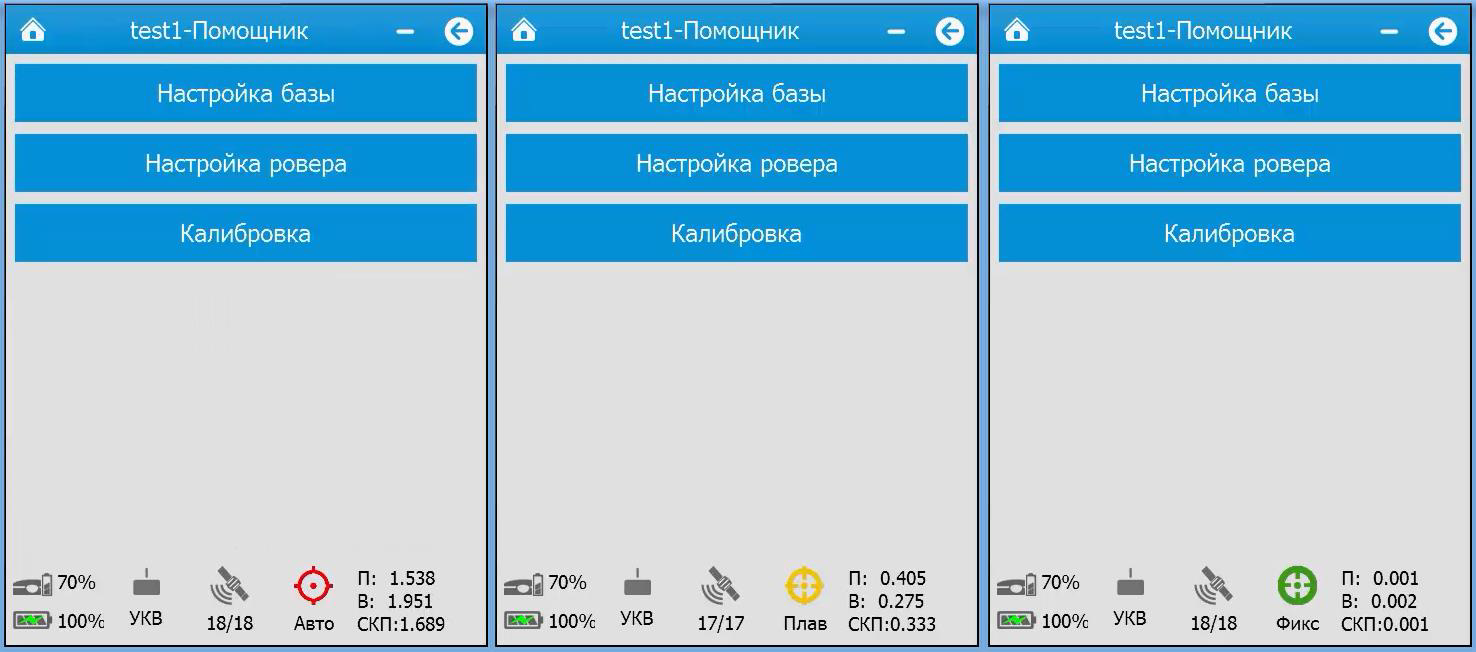
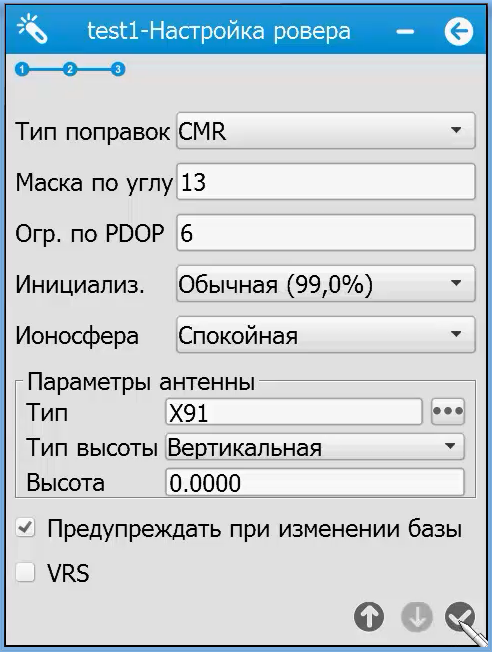
9. Указываем тип поправок, маску, высоту и нажимаем внизу галочку.
10. Далее ждем фиксированного решения и начинаем работать.