Виды интеграции SLAM и ГНСС
Слабо-связанная интеграция (Loose Coupling)
ГНСС выдаёт готовые координаты или скорость, а SLAM формирует собственную траекторию. Обе системы работают раздельно, а их результаты объединяются в фильтре. В условиях леса или плохой видимости спутников GNSS может полностью потеряться, и остаётся только автономный SLAM, где растёт дрейф.
Полностью тесно-связанная интеграция (Tight Coupling)
Используются не готовые координаты, а сырые измерения: псевдодальности, фазы несущей. Эти данные объединяются с измерениями SLAM и IMU в едином фактор-графе или фильтре состояний. Даже при 2–3 спутниках система получает «слабые якоря», что существенно снижает дрейф и повышает устойчивость работы в сложных условиях. Тесно связанная интеграция эффективно подавляет характерные для слабой интеграции артефакты — расслоение и утолщение облака точек на повторяющихся участках траектории.
Алгоритм RS10 использует тесно-связанную интеграцию в реальном времени.
Причины накопления ошибки
Несмотря на тесно-связанную интеграцию, которая позволяет корректировать траекторию с использованием даже частичных измерений ГНСС и тем самым снижать скорость накопления ошибок, полностью избежать дрейфа в условиях нестабильного ГНСС сигнала невозможно: ограниченная видимость спутников, многолучевость, шумы и смещения IMU, а также отсутствие замыканий петель приводят к тому, что за длительное время работы (> 20 минут) траектория постепенно уходит от реальности.
В случае со слабо-связанной интеграцией при нестабильном ГНСС сигнале система переходит в "чистый" SLAM, не используя ГНСС модуль, что в свою очередь ускоряет накопления ошибки.
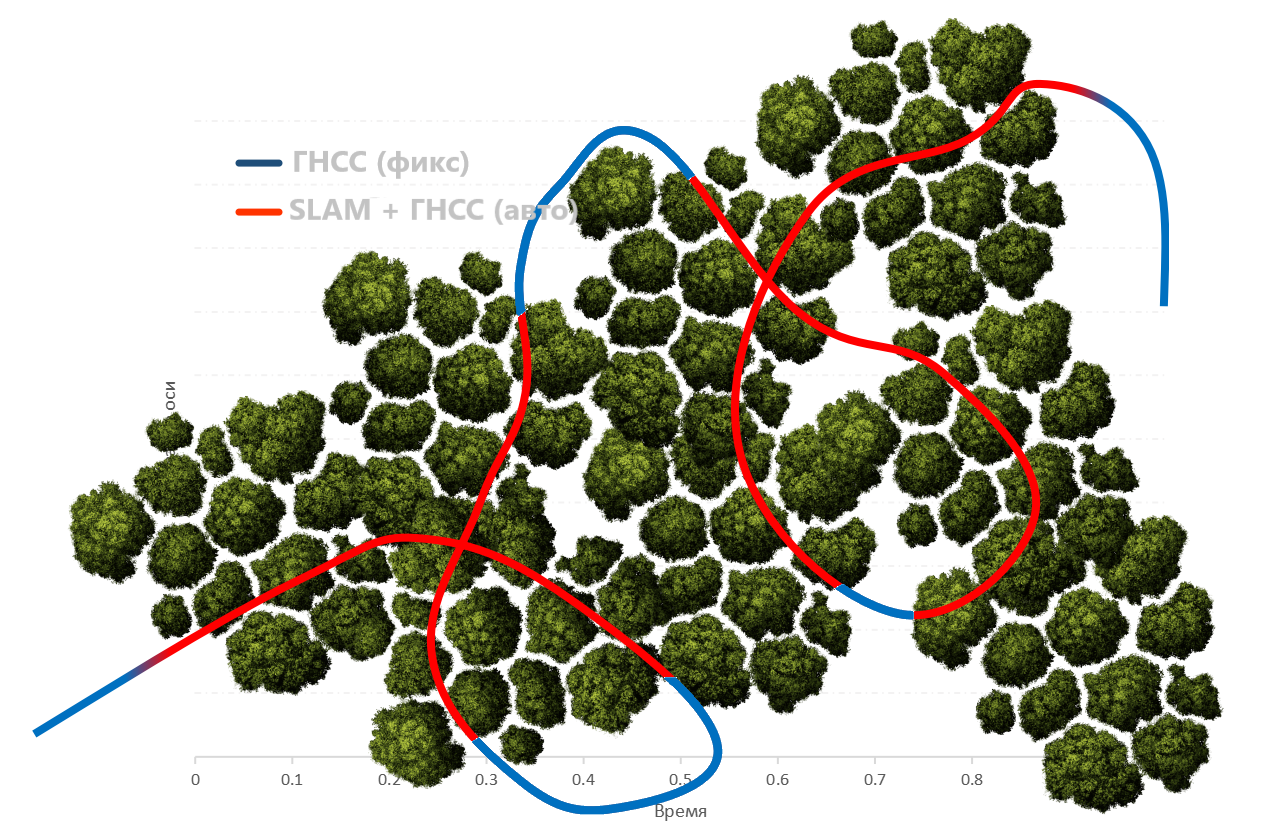
Что происходит с данными в лесу, несмотря на старт и финиш с фиксированным ГНСС?
Даже при тесно-связанной интеграции SLAM+GNSS+IMU данные, собранные в условиях слабого сигнала, будут содержать накопившийся дрейф.
Причины накопления ошибки
- Ограниченная видимость спутников: слабые или отсутствующие сигналы не дают жёсткой глобальной привязки
- Шумы и дрейф SLAM/IMU: ошибки акселерометров, гироскопов и накопленный дрейф SLAM накапливаются со временем
- Многолучевость: сигналы от крон деревьев создают ложные измерения
- Отсутствие замыканий петель: если SLAM не возвращается к уже пройденным точкам, дрейф не корректируется
Роль тесно-связанной интеграции
Tight Coupling снижает скорость накопления ошибки за счет использования даже слабых GNSS-измерений (псевдодальности, фазы несущей), объединяя их с SLAM и IMU в едином фильтре. Это стабилизирует скорость и направление, но не устраняет дрейф полностью, особенно при длительном автономном движении в лесу.
💡 Простая аналогия
Представьте, что вы идёте по лесу с завязанными глазами, считая шаги и запоминая повороты. В начале и в конце вы открываете глаза и видите свои реальные координаты. Но если в середине пути вы ошиблись на шаг или угол, средняя часть вашей траектории будет смещена, несмотря на то, что начальная и конечная точки привязаны к реальности.
Вывод и рекомендации
Длительный промежуток без стабильного ГНСС сигнала и без петель является экстремальной нагрузкой для SLAM алгоритмов. Точность на выходе, скорее всего, будет неприемлема для большинства профессиональных геодезических и инженерных задач.
Что делать в такой ситуации?
Создавать петли
Любыми способами планируйте маршрут так, чтобы пересекать свой путь. Даже одна-две петли способны радикально уменьшить глобальный дрейф. В качестве петель можно создавать траекторию в виде галсов. Однако даже в этом случае не рекомендуется делать маршрут слишком длинным (не более 30 минут, если нет стабильного ГНСС сигнала или опорных точек).
Рекомендуется выполнять замыкания каждые 200 - 300 м, или каждые 5 - 6 минут.
Использовать опорные точки
Опорные точки помогают как контролировать, так и корректировать траекторию в сложных условиях. Также они являются единственным спасением, если петли невозможны (например, длинный прямой тоннель). Разместите в зоне сканирования марки или используйте четкие природные объекты.
 |  |
Разбивать маршрут на сегменты
Если есть возможность выйти на ГНСС хотя бы на 1-2 минуты в середине маршрута, это разобьет один длительный дрейф на несколько, что значительно улучшит точность.
В этом случае рекомендуется дополнительно снимать контрольные точки, для оценки качества полученного результата!
Делать остановки в тоннелях
При съёмке в тоннелях рекомендуется через определённые интервалы времени делать короткие остановки. Алгоритмы CHCNAV RS10 автоматически распознают периоды покоя и использует их для стабилизации облаков точек и снижения накопленного дрейфа.
Даже короткая пауза позволяет алгоритму скорректировать траекторию и улучшить точность всей съёмки.
Таким образом, старт и финиш со стабильным сигналом ГНСС (фиксированное решение) не являются панацеей. Они задают абсолютные координаты начала и конца вашей траектории, но не гарантируют точности всего пути между ними...