Для импорта привязок фотоизображений камеры Insta360 с RS10 в ТИМ КРЕДО 3D СКАН нужно выполнить следующие действия:
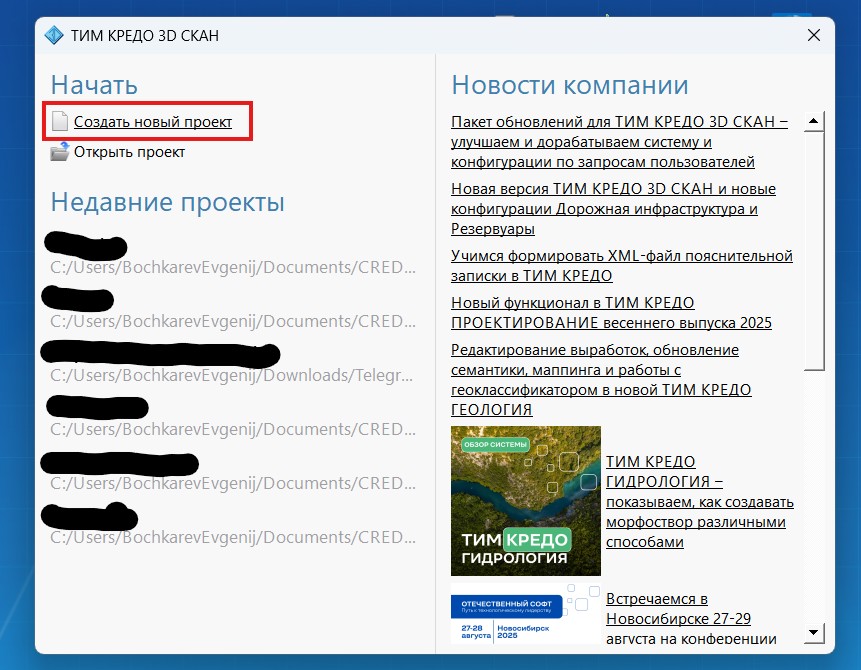
1) После запуска программы создайте новый проект.
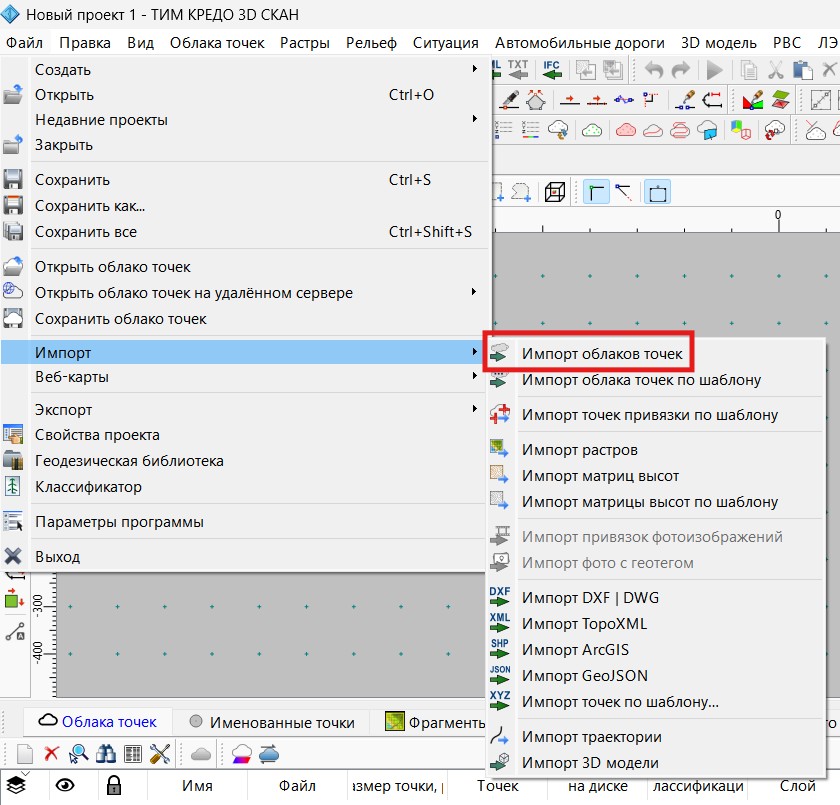
2) Затем зайдите во вкладку Файл – Импорт – Импорт облаков точек.
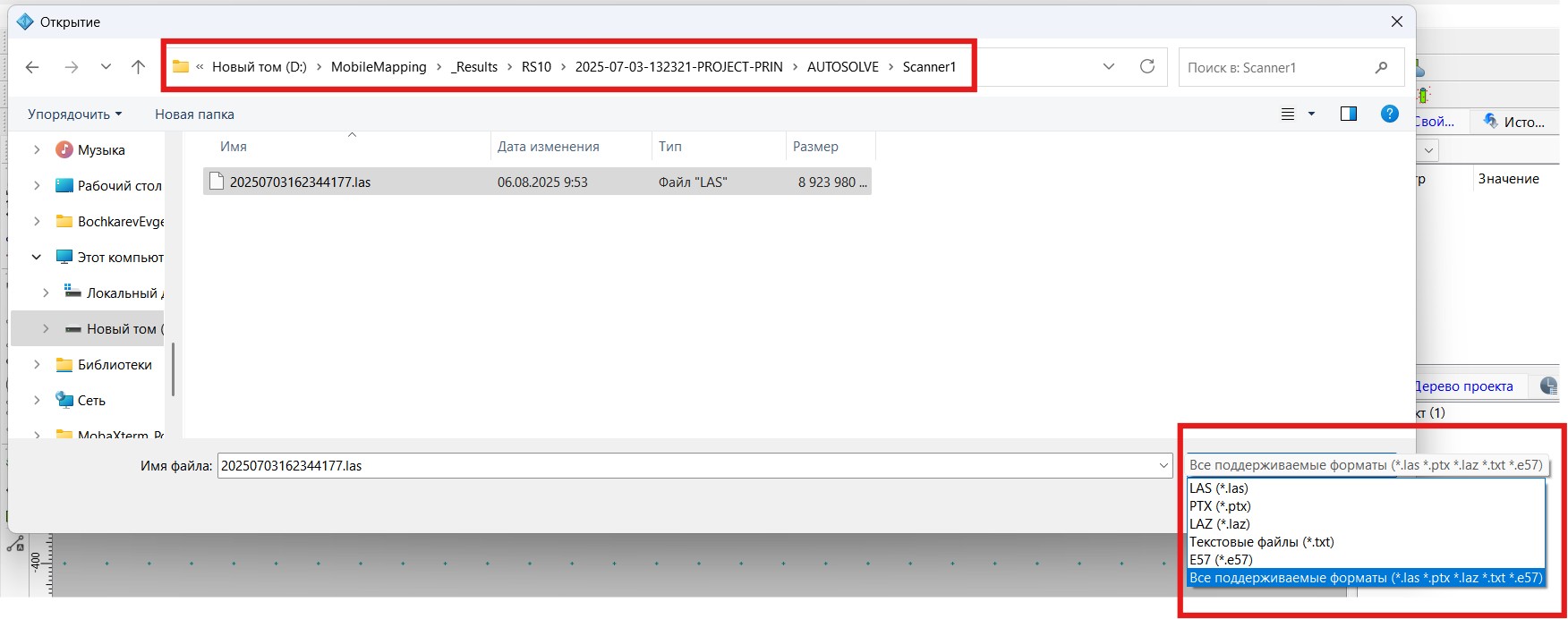
3) В директории укажите путь к нашему облаку (КРАСНЫЙ ПРЯМОУГОЛЬНИК СВЕРХУ), программа поддерживает разные форматы облаков, вы можете выбрать какой вам нужен для работы (БОЛЬШОЙ ПРЯМОУГОЛЬНИК СПРАВА).
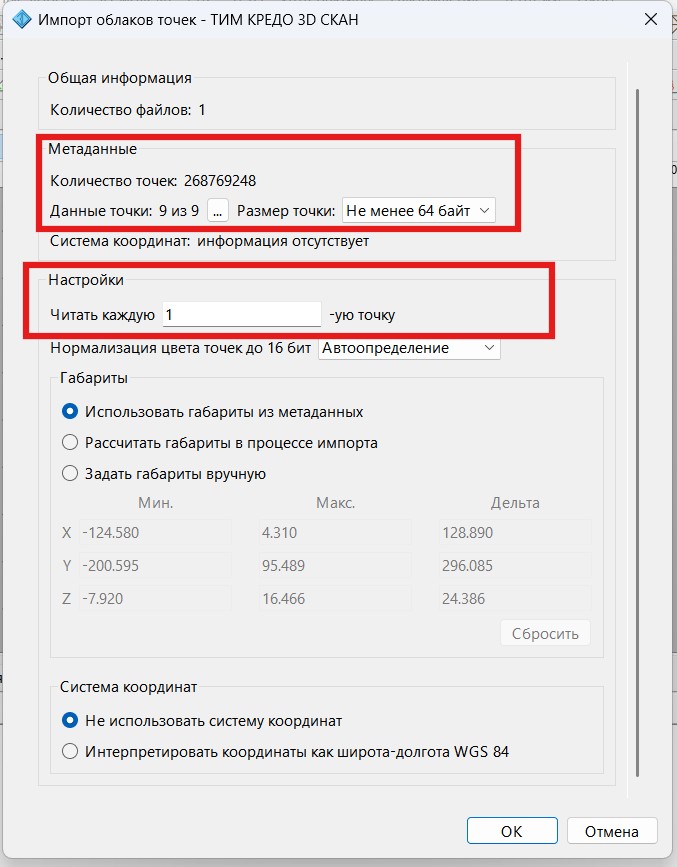
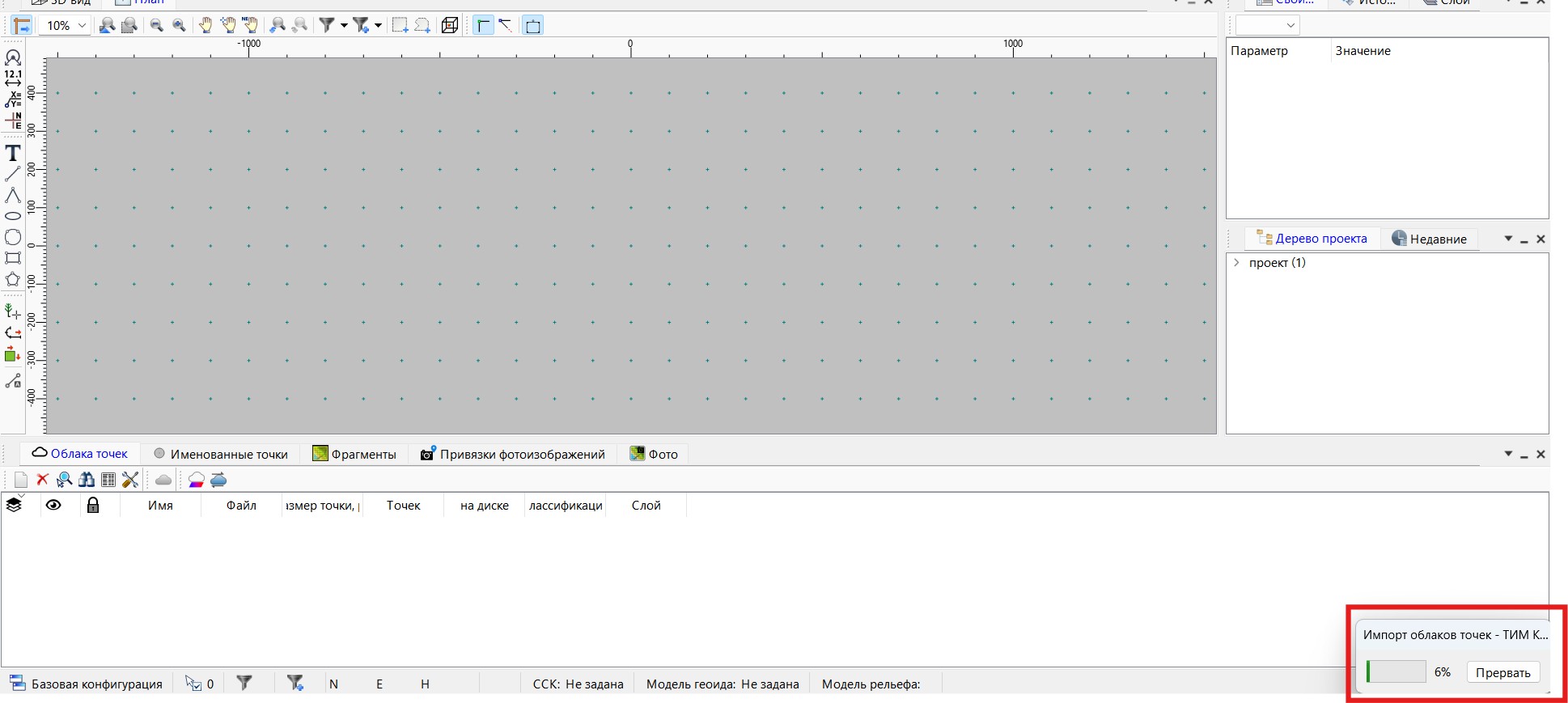
4) После того, как вы выбрали облако точек для импорта, появится окно, где вы сможете выбрать размер точек в байтах, данные точки (X, Y ,Z ,Слой, Интенсивность, Цвет ,Время, Номер отражения, Угол сканирования), и на этапе импорта сделать прореживание (через какой интервал выбрать точку для импорта). После нажатия кнопки ОК на 2 фото можно увидеть, что в правом нижнем углу будет происходить импорт нашего облака.
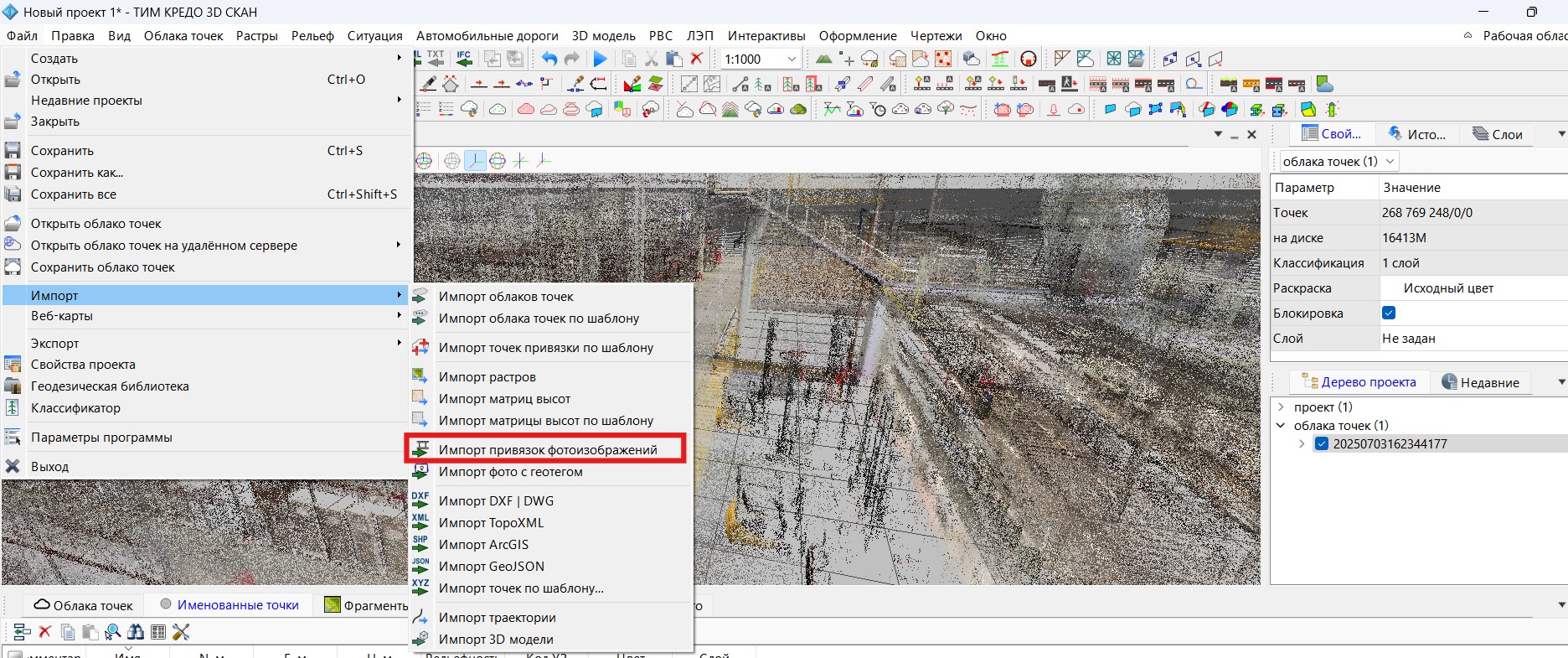
5) После того как произошел импорт облака точек, переходим к импорту привязок фотоизображений. Для этого заходим во вкладку Файл – Импорт – Импорт привязок фотоизображений.
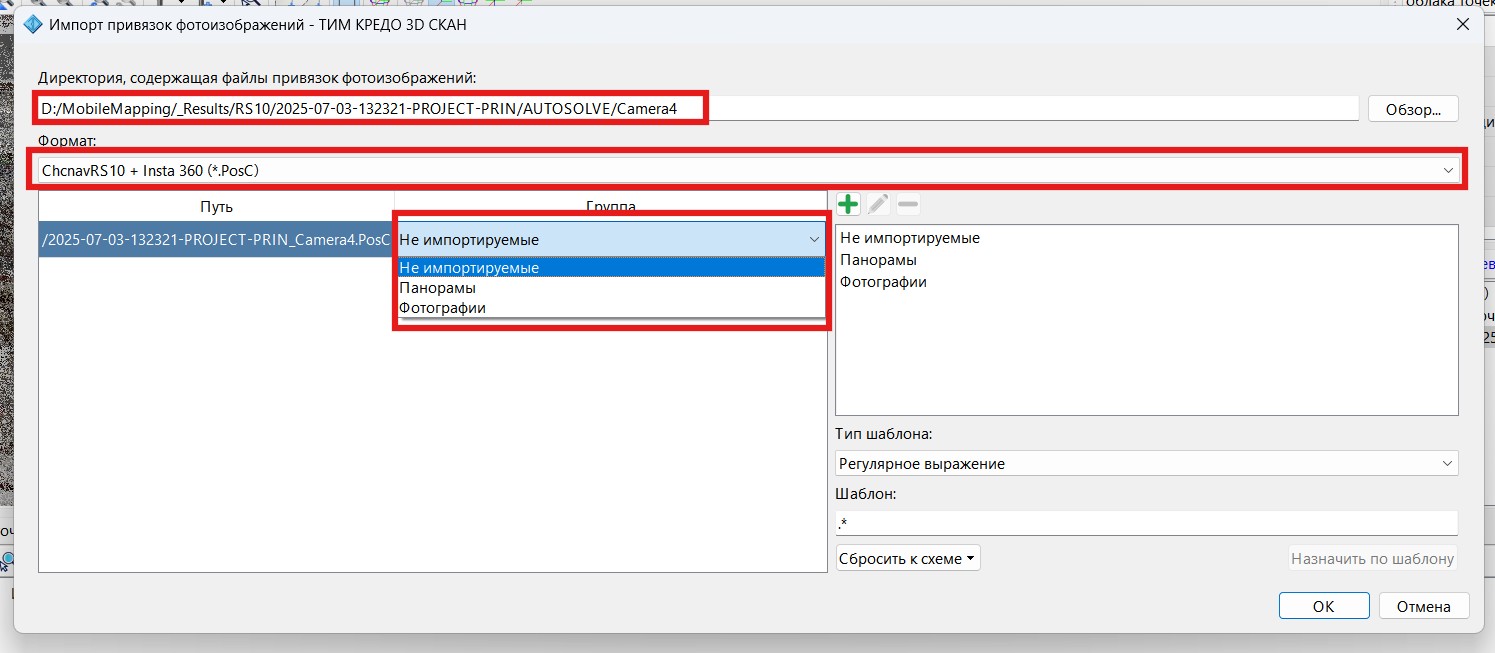
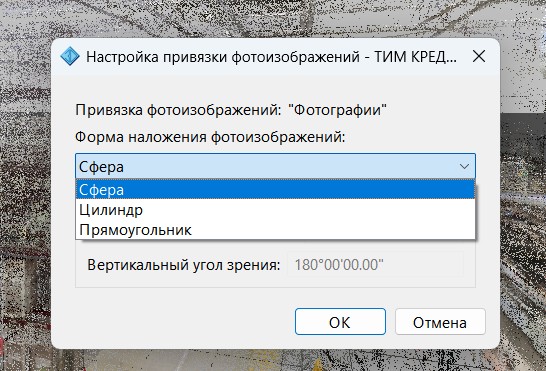
6) В импорте привязок фотоизображений указываем путь к директории, где лежат файлы привязок фотоизображений (КРАСНЫЙ ПРЯМОУГОЛЬНИК СВЕРХУ), формат (ЦЕНТРАЛЬНЫЙ ПРЯМОУГОЛЬНИК), и во вкладке Группа выбираем Панорамы. После нажатия кнопки ОК появится настройка привязки фотоизображений, где нужно будет выбрать форму наложения фотоизображений на облако точек (в нашем случае выбираем СФЕРА).
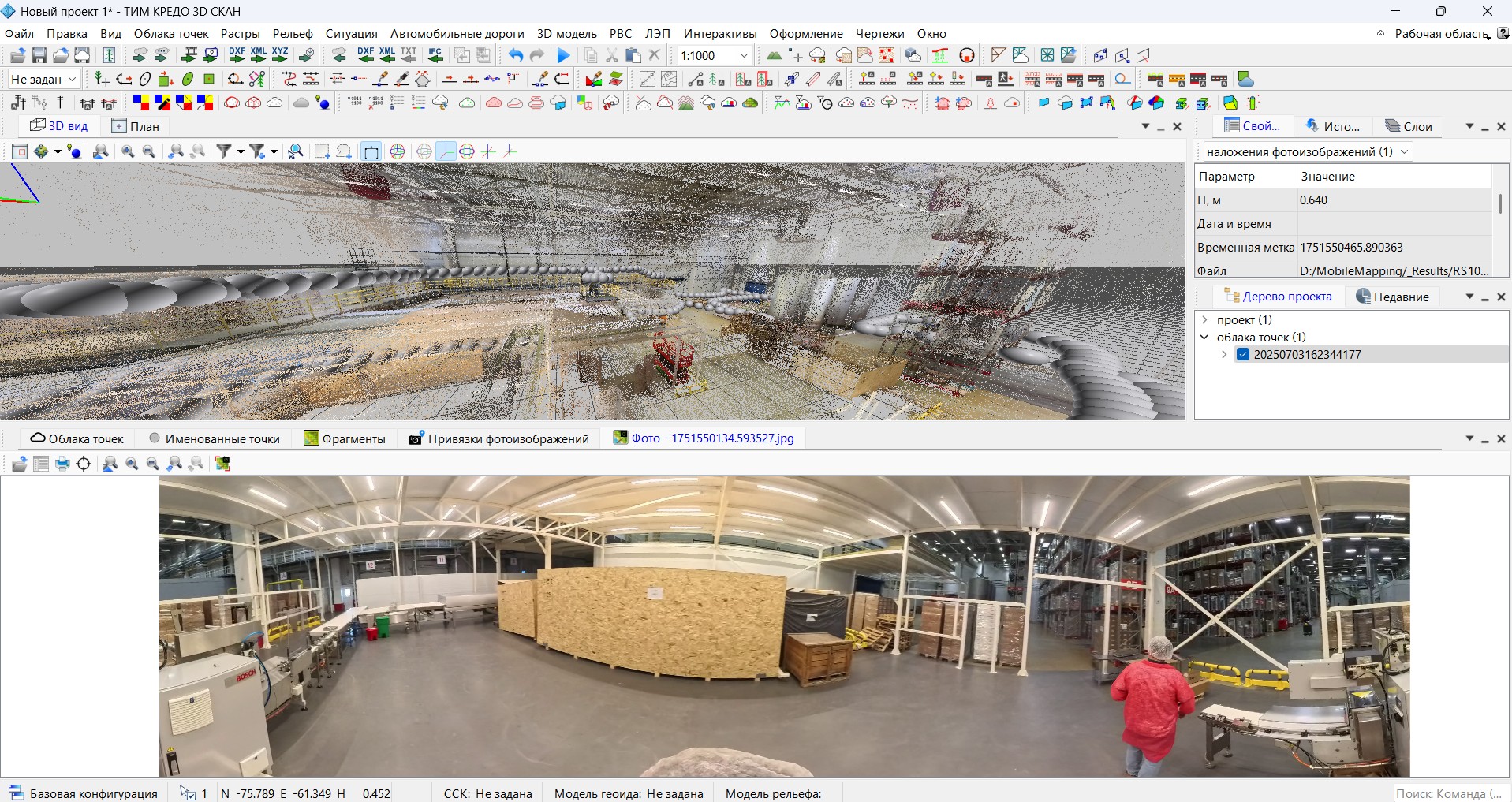
7) После импорта во вкладке Привязки фотоизображений мы с вами видим количество фотоизображений,импортируемых в облако. Также на самом облаке мы видим те самые сферы, так называемые формы наложения.
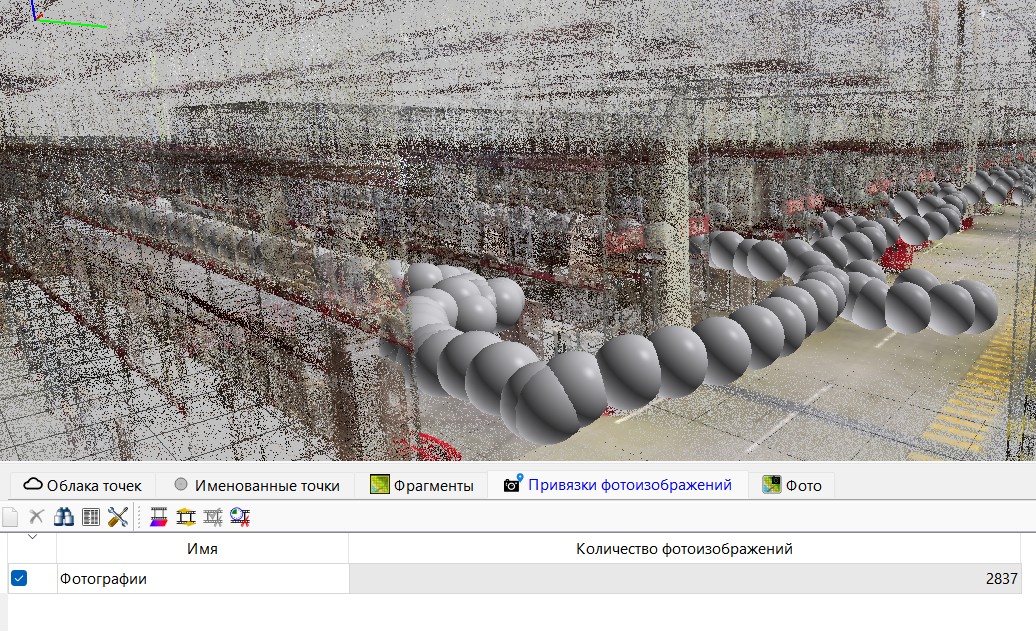
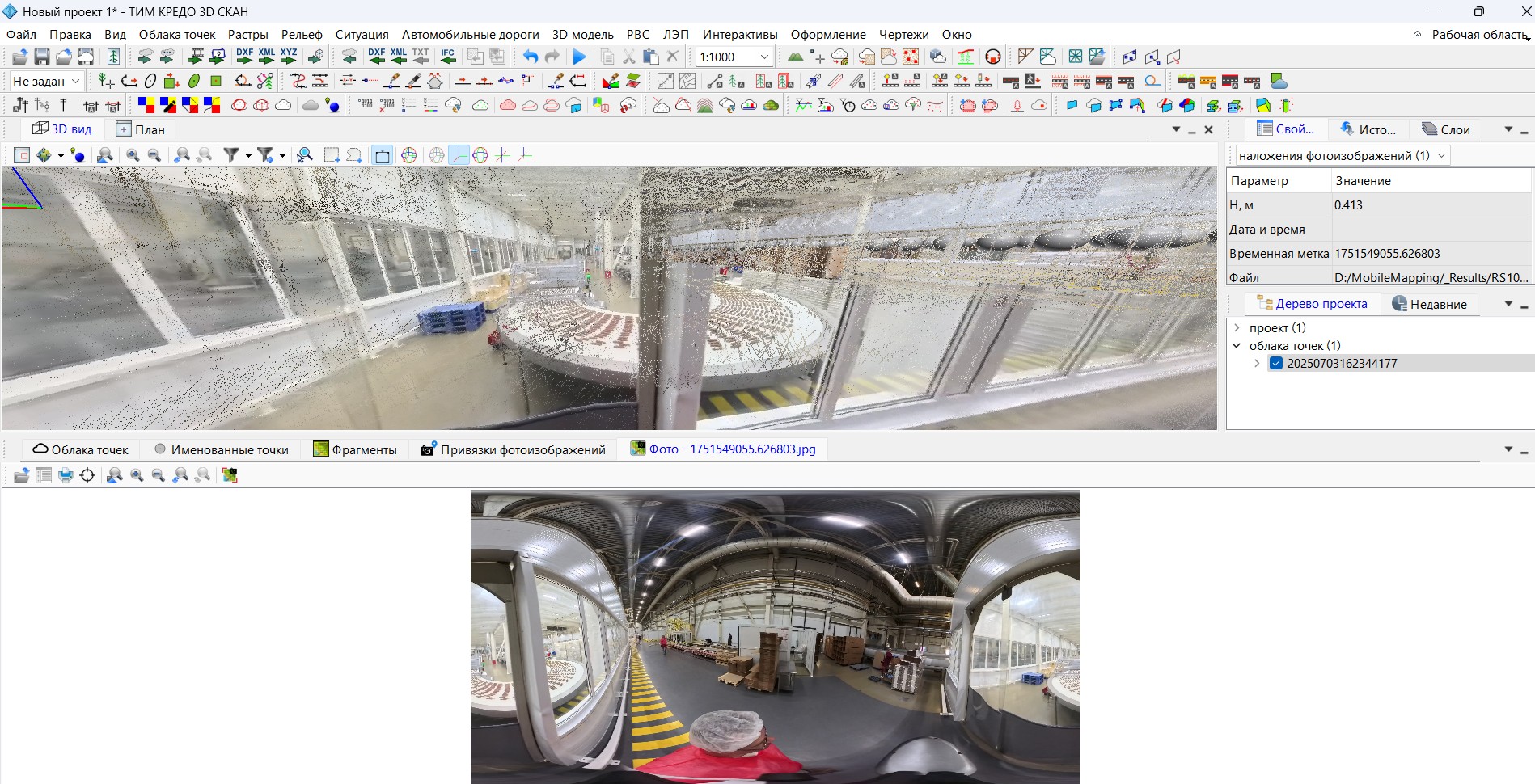
В результате мы получаем наложенные панорамы на облако, нажатием двойной клавиши мыши на определенную сферу, мы получаем панорамное фото и раскраску этого места. Также при перемещении облака будут перемещаться и панорамы. Ниже указан пример скринов.
Панорамы являются помощником для того, чтобы мы могли понять, какие же данные у нас есть и с панорам видеть то, чего мы не увидим на облаке точек.