Режим [Видеосъемка] в приемниках PrinCe .
Примечание: Приёмники поддерживающие данный режим - i30VR, i90VR
Приёмники, поддерживающие режим [Видеосъемка], оснащены 2 камерами (Рис.1):

Рис.1
Нижняя камера с разрешением 2 Мп предназначена для работы в режиме дополненной реальности (AR).

Рис. 2
Фронтальная камера с разрешением 2 МП позволяет осуществлять фотографирование объекта с возможностью автоматической сшивки и скалывания координат любой точки фотоснимка.
В данной статье мы разберем, какие данные можно получить с помощью режима [Видеосъемка].
После запуска режима [Видеосъемка] в ПО LandStar 8 необходимо записать видео измеряемого объекта с помощью фронтальной камеры.
Далее в полевом контроллере производится автоматическая обработка записанного видео, при котором из видеопотока формируются отдельные геопривязанные изображения (снимки) (Рис.3).
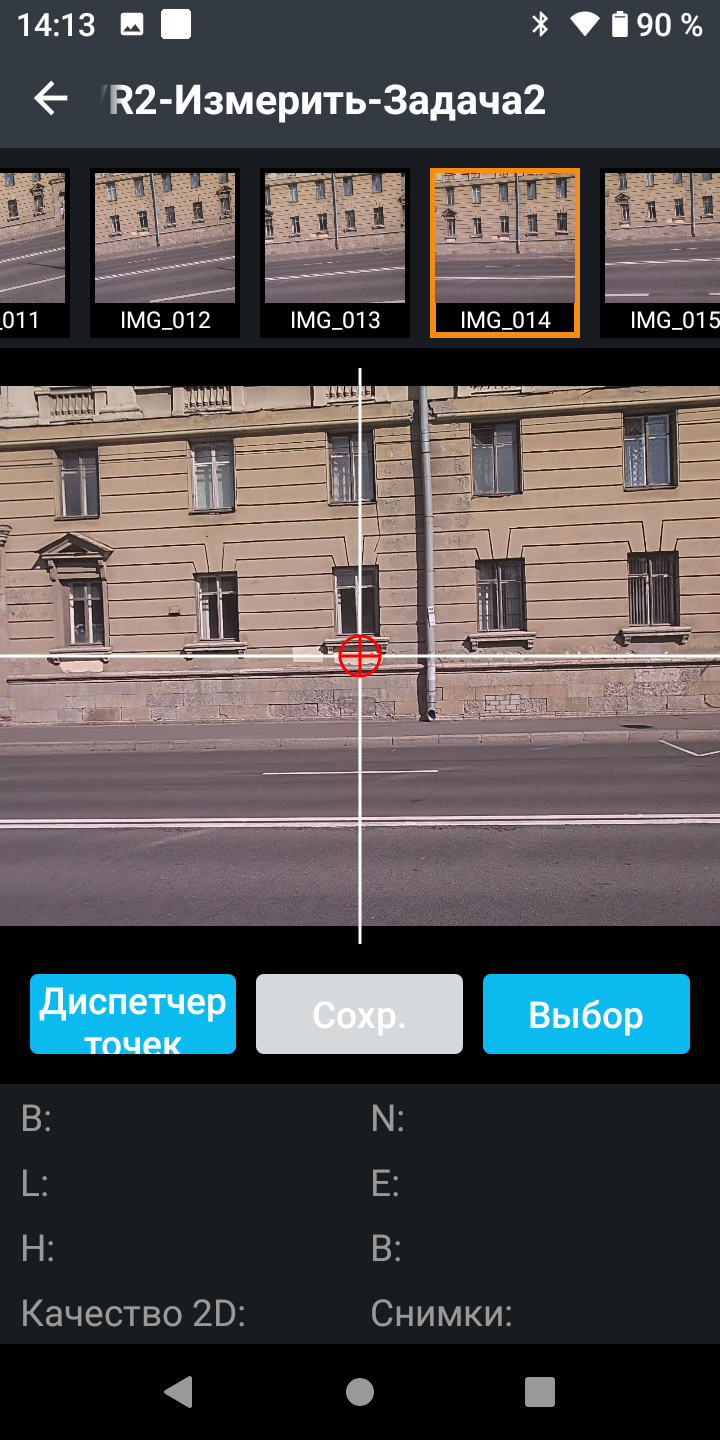
Рис. 3
При помощи метода фототриангуляции, реализованного в ПО LandStar, по снимкам можно получить координаты точек сразу в местной системе координат.
Для этого необходимо сколоть точки на нескольких снимках (Рис. 4). При этом координаты одной и той же точки, сколотой на разных снимках, будут усредняться и уточняться (рекомендуем использовать не менее 3-х снимков для получения более точного результата).
Заявленная точность определения координат данным способом: 2 - 4 см на расстоянии от 2 до 15 метров.
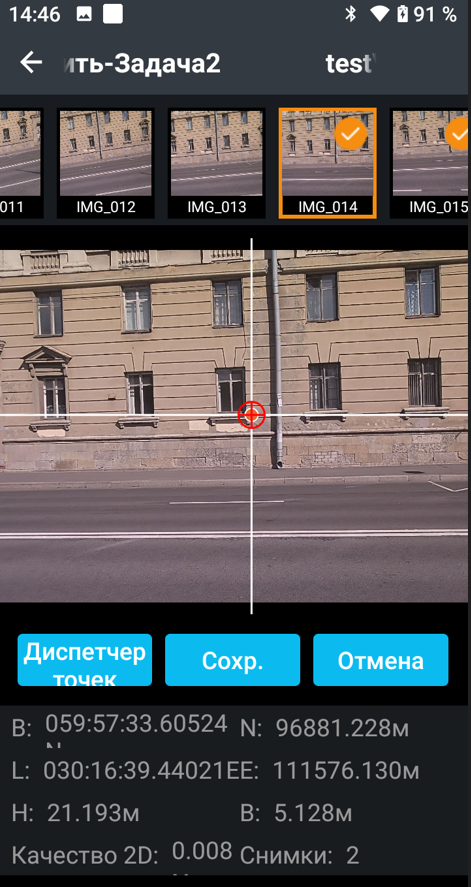
Рис. 4
Рассмотрим получаемые данные с приемника, с помощью которых в постобработке можно получить облако точек, а также 3D-модель.
Эти данные можно скачать с контроллера, записываются они в его внутреннюю память (путь:\HCE600\Внутренний общий накопитель\CHCNAV\Projects\VRtest\ImageTask) (Рис. 5)
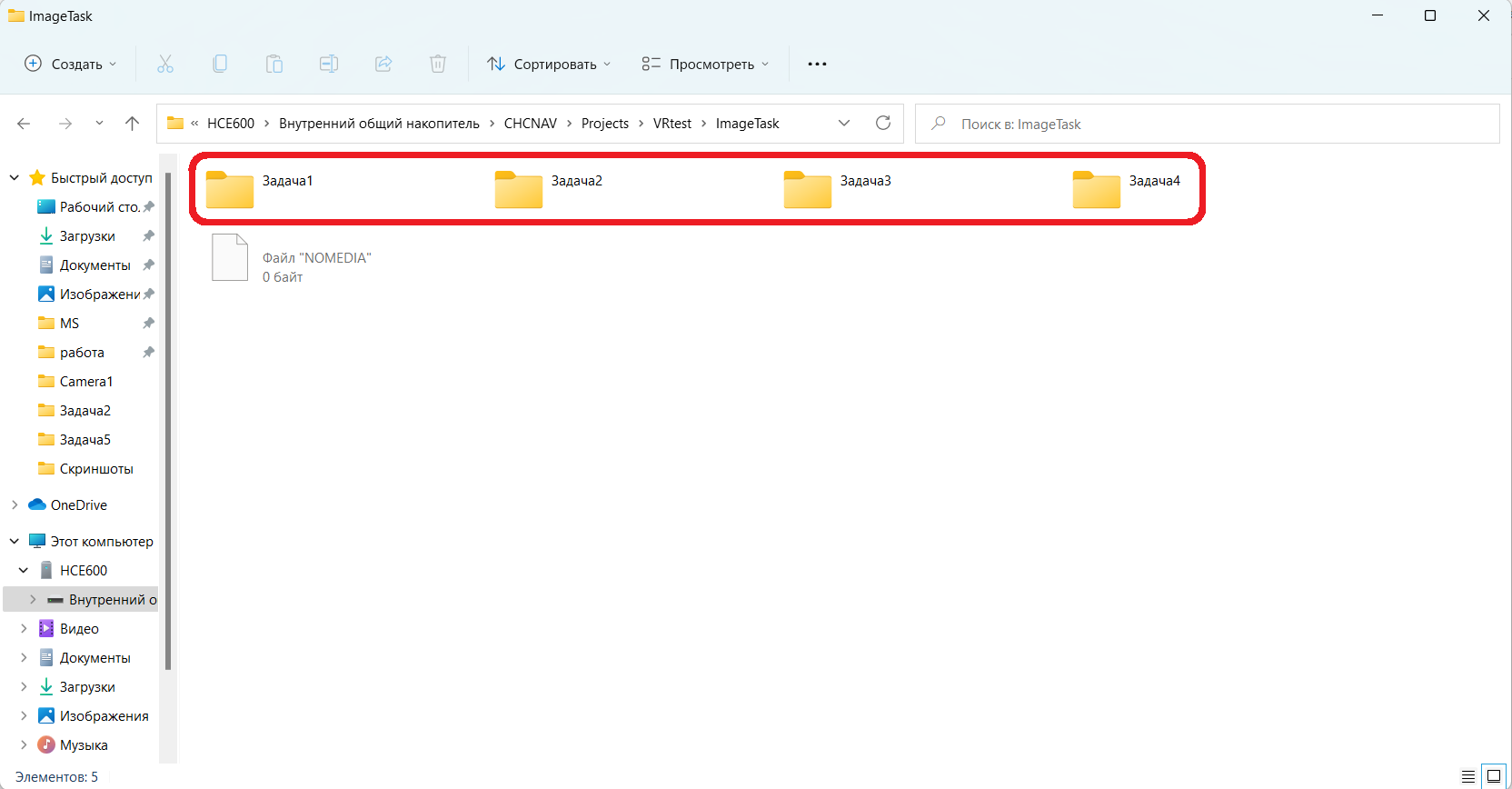
Рис. 5
Геопривязанные снимки (Рис. 6).
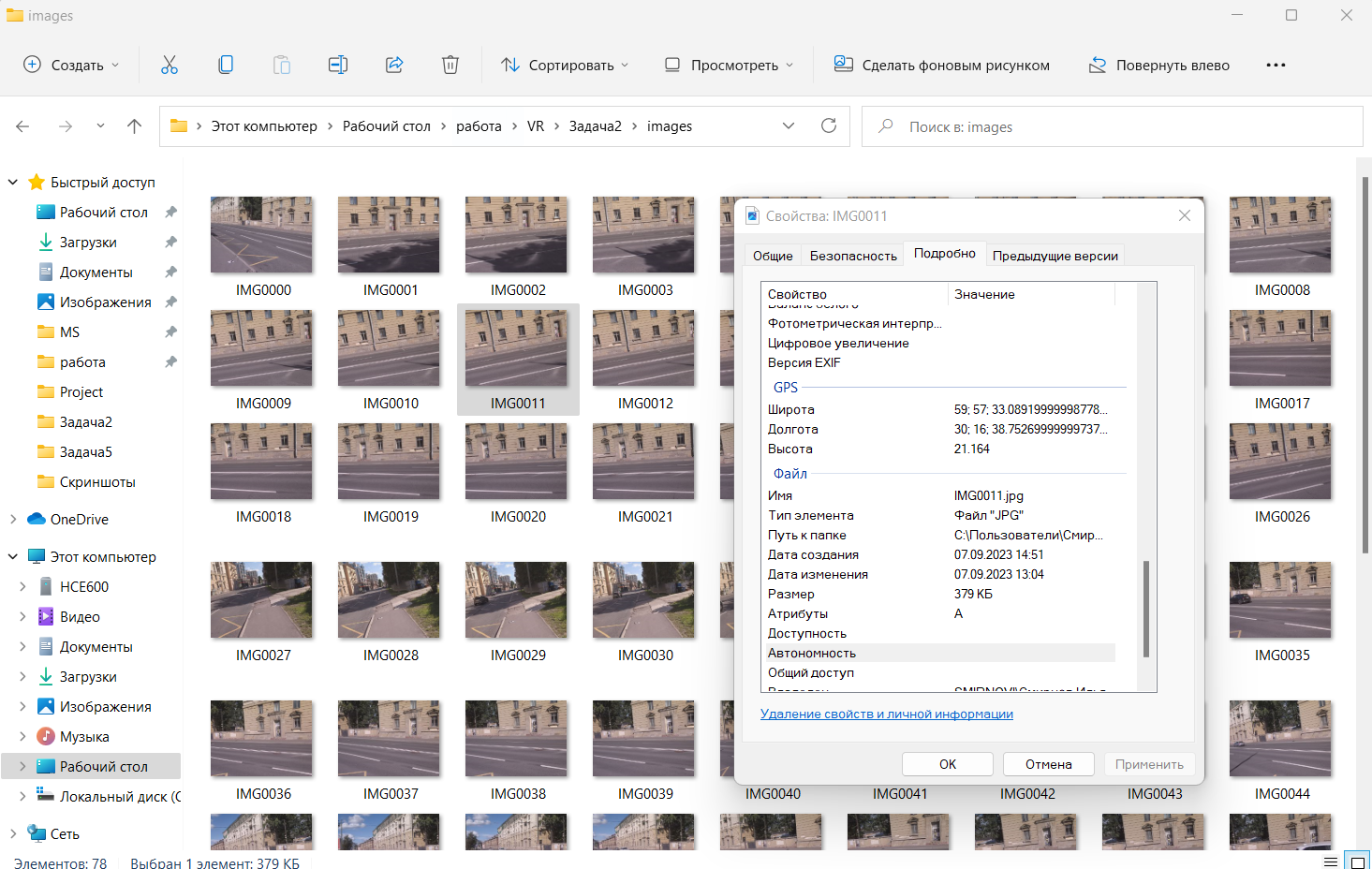
Рис 6.
Txt файл с параметрами камеры фотографирования (Рис. 7).
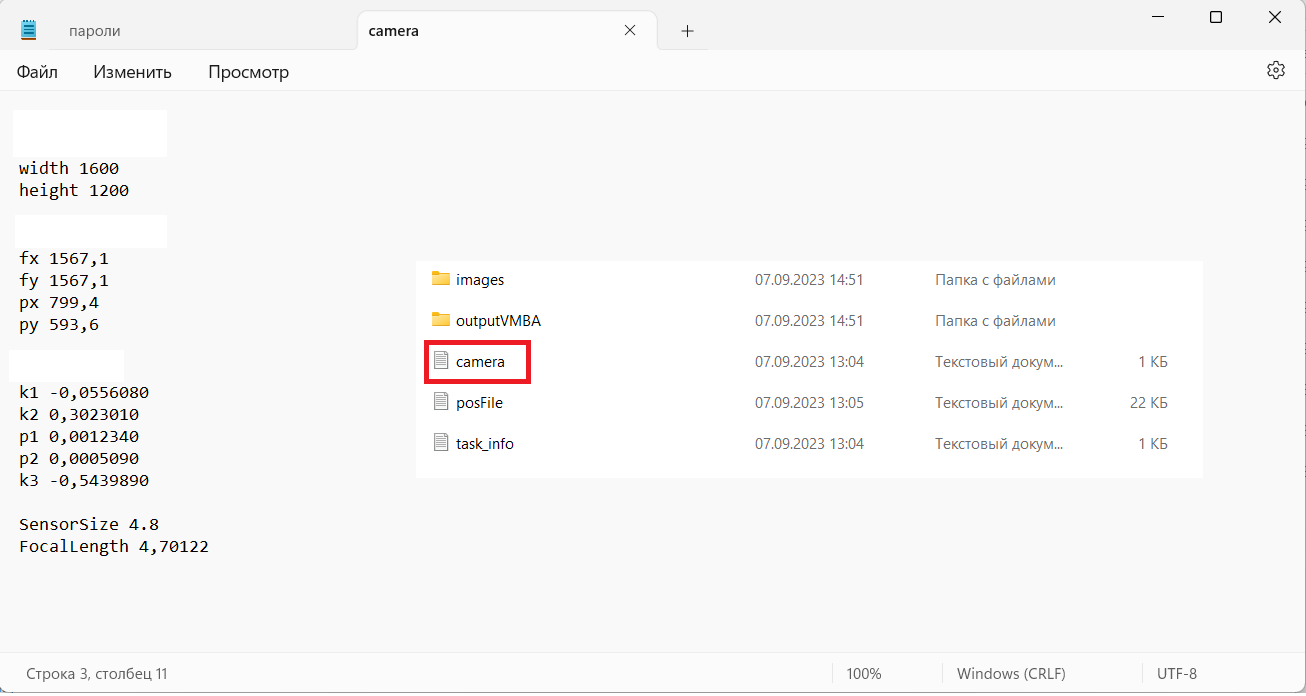
Рис. 7
posFile.txt файл с параметрами снимков (имя снимка, координаты центров снимков, крен, тангаж, рысканье) (Рис. 8).
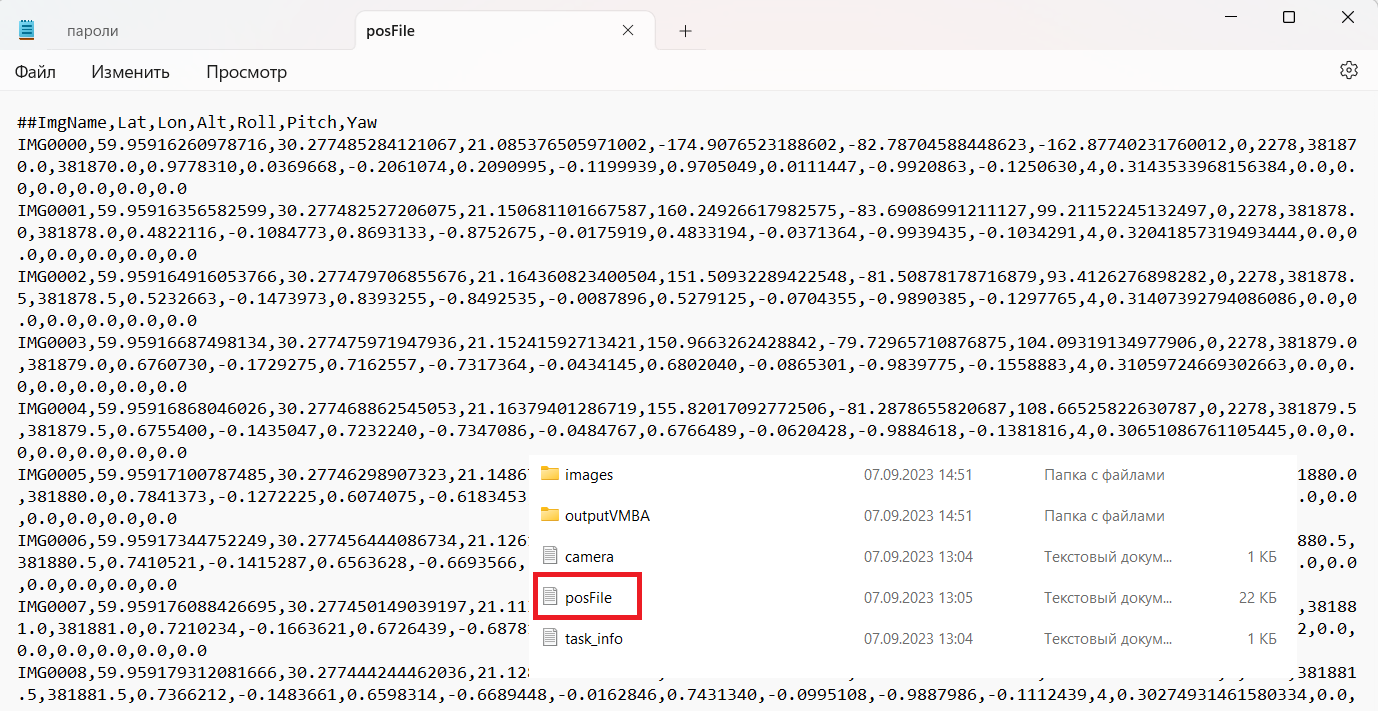
Рис. 8
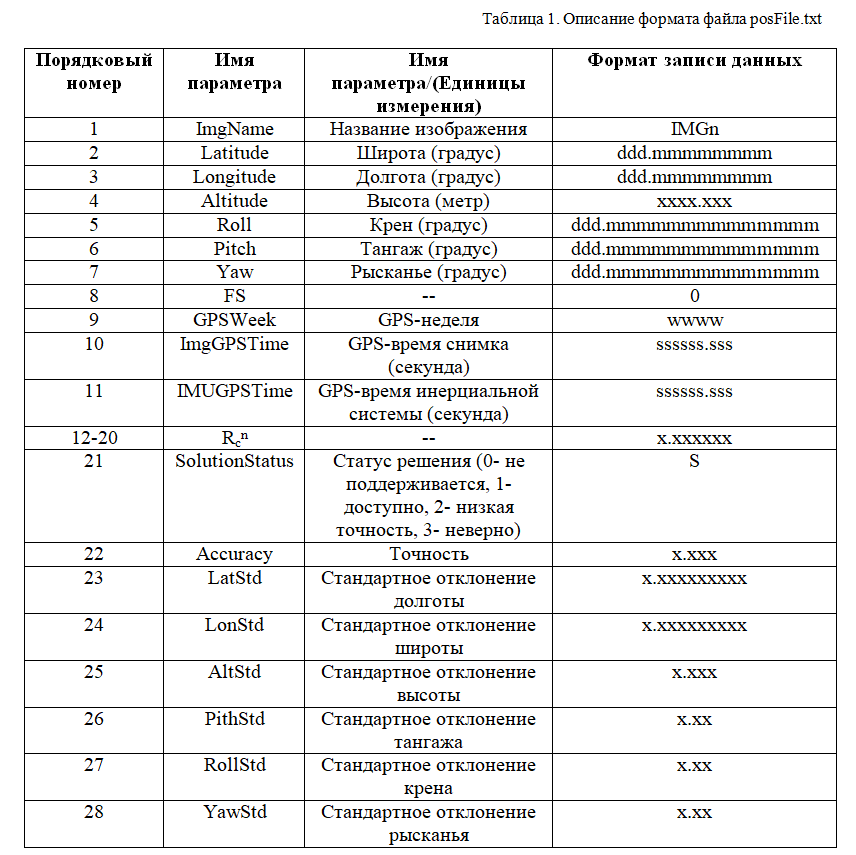
Информация записанная в PosFile.txt
ImgName, Latitude, Longitude, Altitude, Roll, Pitch, Yaw, FS, GPSWeek,
ImgGPSTime, IMUGPSTime, Rcn, SolutionStatus, Accuracy, LatStd, LonStd, AltStd,
PithStd, RollStd, YawStd
Для использования в стороннем ПО, пока применимы, только первые 7 параметров.
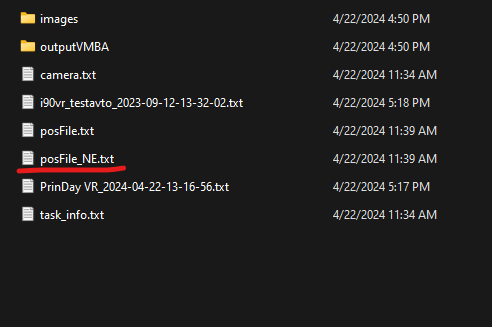
Также формируется файл posFile_NE.txt файл с параметрами снимков в локальной (заданной в проекте) системе координат (имя снимка, координаты центров снимков, крен, тангаж, рысканье).
Эти данные совместимы со всеми популярными программами фотограмметрической обработки и 3D – моделирования (например Кредо Фотограмметрия). Полученные вместе с координатами снимки, могут использоваться для фотограмметрической обработки и получения 3D моделей и трехмерных координат точек со снимков. Особенно актуально использовать эти данные для дополнения информации, полученной с аэрофотосъемки.
Пример полученного облака точек фасада здания с помощью приемника PrinCe в ПО Кредо Фотограмметрия (Рис. 9)
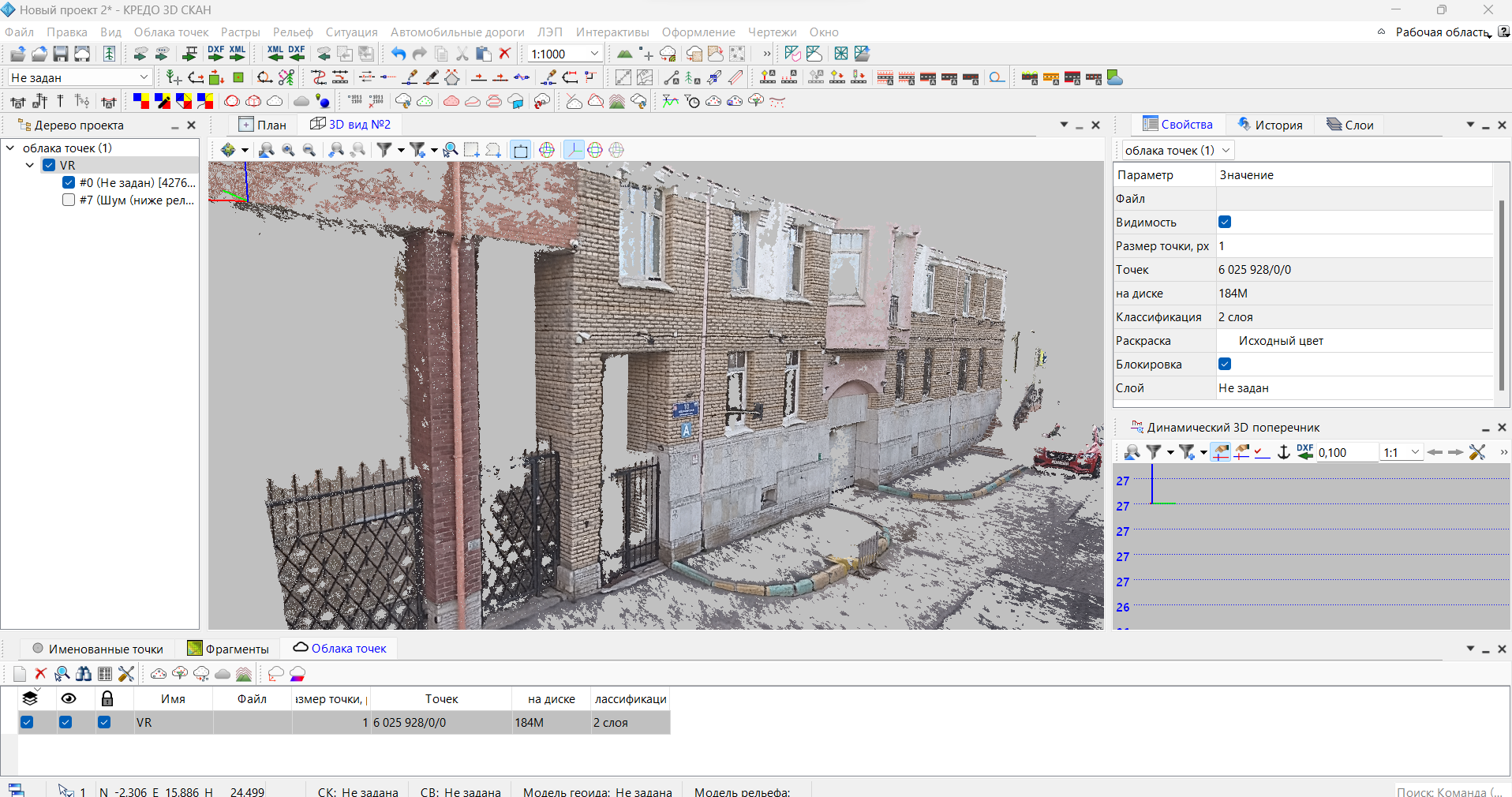
Рис. 9
Пример 3D-модели фасада здания с помощью приемника PrinCe в ПО Agisoft Metashape (Рис. 10)
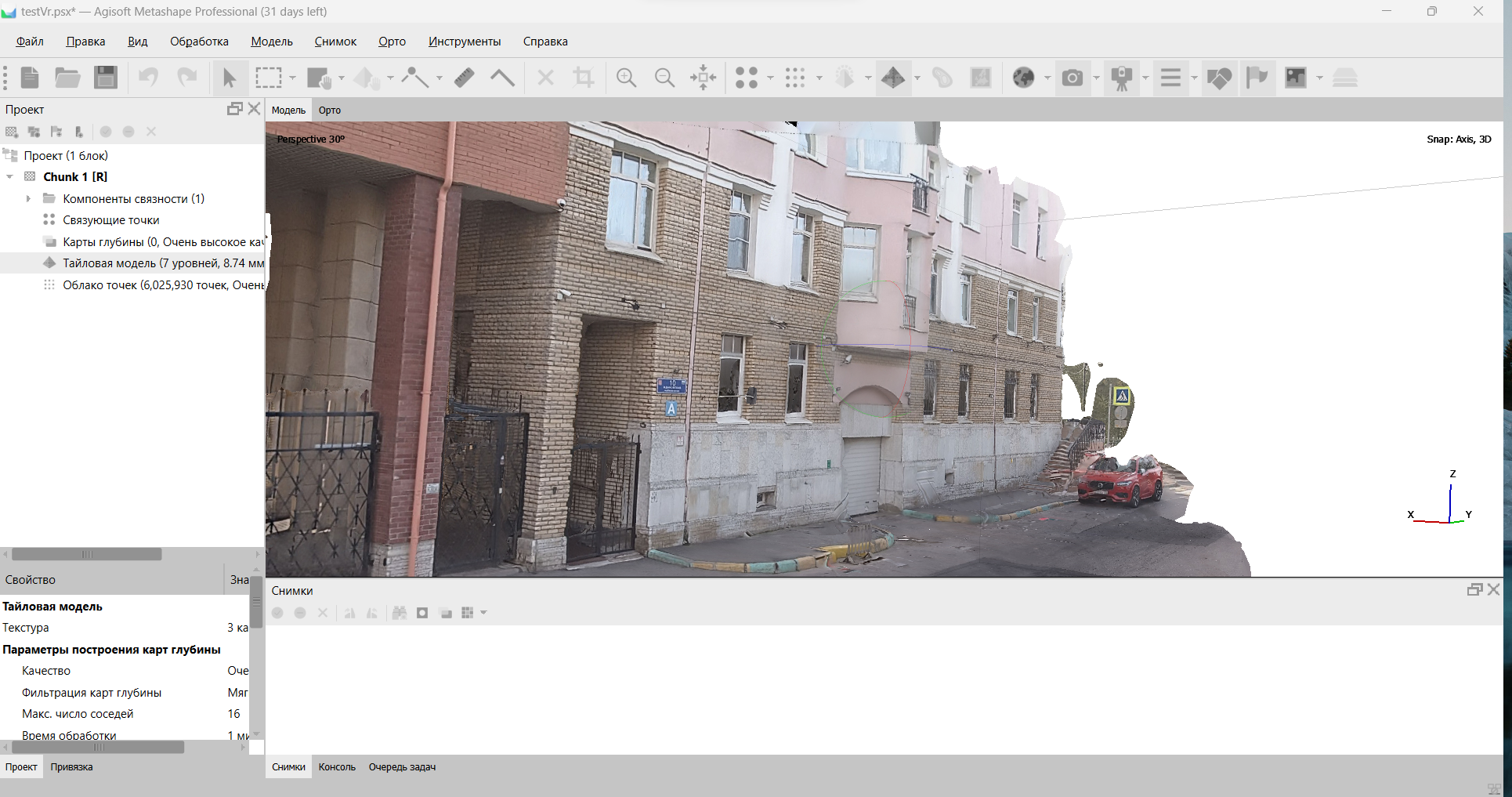
Рис. 10
Дополнительно:
1. Пошаговая инструкция работы в режиме [Видеосъемка]: https://support.prin.ru/knowledge_base/item/309413
2. Вынос точек в режиме дополненной реальности (AR): https://support.prin.ru/knowledge_base/item/309886